一、基本情况
孙炜,博士、教授、博士生导师,湖南大学党委副书记,机器人视觉感知与控制技术国家工程研究中心机器人控制技术首席科学家,被授予“有突出贡献中青年专家”荣誉称号,享受国务院政府特殊津贴。
联系方式:
邮箱:david-sun@126.com
电话:0731-88823079
二、研究方向
机器人及人工智能,目前重点研究室内定位导航、机器视觉及应用、语义控制等机器人智能化技术。
三、研究业绩
先后获得国家技术发明二等奖1项、国家科技进步二等奖2项,省部级科技奖励12项。先后主持和参与科研项目30项,其中国家级项目14项,省部级项目10项。发表学术论文200多篇,获得发明专利40余项,出版教材和专著3部,研发多款机器人系统及装置、装备,取得了良好的经济效益和社会效益。
1、主要科研获奖
[1] 2019年湖南省科技进步奖一等奖:机器人智能引导与协作技术及其应用,排名第1.
[2] 2018年国家技术发明奖二等奖:高端制药机器人视觉检测与控制关键技术及应用,排名第3。
[3] 2018年中国产学研合作创新成果奖一等奖:机器人视觉感知及控制技术,排名第1。
[4] 2015年高等学校科学研究优秀成果奖(科学技术)二等奖:混合动力汽车电控系统关键技术,排名第1。
[5] 2013年中国机械工业科学技术奖二等奖:高压输电线路除冰巡检机器人关键技术及应用,排名第2。
[6] 2010年中国机械工业科学技术奖二等奖:《智能控制系统》[第2版],排名第2。
[7] 2009年第7届湖南省青年科技奖。
[8] 2007湖南省科技进步二等奖:现代电驱动车辆先进控制技术及其应用,排名第7。
[9] 2007中国机械工业科学技术奖二等奖:大型复杂机电系统建模与智能优化控制技术及其工程应用,排名第8。
[10] 2006年国家科学技术进步奖二等奖:高速灌装生产线智能检测分拣成套装备研制及其推广应用,排名第3。
[11] 2006年湖南省自然科学优秀学术论文一等奖:A Robust Robotic Tracking Controller Based on Neural Network,排名第1。
[12] 2005年湖南省科技进步奖一等奖:复杂工业系统的综合集成智能控制理论方法、算法、实时控制软件及其应用,排名第6。
[13] 2004年国家科学技术进步奖二等奖: 智能图像信息处理方法及其在工业系统中的应用,排名第6。
[14] 2004年中国包装工业科技进步奖一等奖:包装生产线上的智能检测机器人,排名第4。
2、主要科研项目
[1] 国家自然科学基金联合基金重点项目:多源信息融合的智能制造感知检测与人机交互关键技术研究。
[2] 国家自然科学基金联合基金重点项目:多源信息融合的室内移动机器人定位与导航关键技术。
[3] 国家科技支撑计划:大型医药制造机器人自动化生产线关键技术与成套装备。
[4] 国家科技支撑计划:220kV及以上输电线路在线除冰机器人关键技术与装备研究。
[5] 国家自然科学基金重点项目:高速精密制造生产线的视觉检测与智能优化控制技术研究。
[6] 国家863计划:冷凝器清洗智能机器人。
[7] 国家863计划:大型高速医药自动化生产线上的产品检测包装机器人。
[8] 国家自然科学基金项目:复杂管道环境下风管清扫机器人的智能导航控制关键技术研究。
[9] 教育部新世纪优秀人才计划:复杂环境下的机器人智能视觉伺服控制方法。
[10] 湖南省自然科学基金项目:复杂环境下移动机械臂的视觉导航控制关键技术研究。
[11] 高校博士点基金项目:冰雪环境下电力线除冰机器人自主越障控制方法研究。
[12] 湖南省自然科学基金项目:机器人视觉伺服系统的智能鲁棒控制方法研究。
[13] 长沙市科技计划重大专项:先进工业机器人研发及应用示范—面向制造业的机器人视觉检测与控制关键共性技术。
3、代表性论文
[1] Locate the Mobile Device by Enhancing the WiFi-Based Indoor Localization Model.IEEE Internet of Things Journal,2019,6(5):8792 - 8803.(SCI)
[2] Global genetic learning particle swarm optimization with diversity enhancement by ring topology.Swarm and Evolutionary Computation,2019,44:571-583.(SCI)
[3] Adaptive comprehensive learning particle swarm optimization with cooperative archive.Applied Soft Computing,2019,77:533-546.(SCI)
[4] A novel hybrid algorithm based on PSO and FOA for target searching in unknown environments.Applied Intelligence, 49(7): 2603-2622.(SCI)
[5] A regression method with subnetwork neurons for vigilance estimation using EOG and EEG.IEEE Transactions on Cognitive and Developmental Systems,2019,doi: 10.1109/TCDS.2018.2889223.(SCI)
[6] Augmentation of Fingerprints for Indoor WiFi Localization Based on Gaussian Process Regression. IEEE Transactions on Vehicular Technology,2018,67(11): 10896-10905.(SCI)
[7] Multi-Leader Comprehensive Learning Particle Swarm Optimization with Adaptive Mutation for Economic Load Dispatch Problems.Energies,2018,12(1):1-27.(SCI)
[8] Calibration and decoupling of multi-axis robotic Force/Moment sensors. Robotics and Computer-Integrated Manufacturing, 2018,49:301-308. (SCI)
[9] Modified clustering-based differential evolution with a flexible combination of exploration and exploitation.Soft Computing,2018,22(18): 6087-6098 .(SCI)
[10] All-dimension neighborhood based particle swarm optimization with randomly selected neighbors.Information Sciences, 405(2017):141-156.(SCI)
[11] Adaptive robust control based on RBF neural networks for duct cleaning robot. International Journal of Control, Automation, and Systems, 2015, 13(2): 475-487(SCI)
4、主要专利:
[1] 一种基于机器视觉的透明对象端面缺陷检测方法
[2] 基于机器人视觉伺服的汽车白车身焊点定位方法及装置
[3] 一种塑料输液瓶挤吹灌封装置及具有该装置的一体机
[4] 一种基于二维和三维摄像机融合的三维视觉信息获取方法
[5] 汽车车身网络控制系统教学实验平台
[6] 中央空调风管清扫机器人可调平衡滚动式毛刷总成
[7] 基于光电传感器的电子排挡检测机构
[8] 中央空调风管清扫机器人多自由度立体毛刷清扫装置
[9] 一种6挡手自一体电子排挡及其设计、控制方法
[10] 汽车前照灯自适应控制方法及装置
[11] 高压输电线在线除冰机器人的组合式行走除冰机构
[12] 高压输电线上机器人的行走机构
四、招生
长期招收博士、硕士研究生和博士后研究人员,提供良好的实验和工作环境、专业的指导和优厚的待遇,欢迎对机器人智能化技术有浓厚研究兴趣的同学加入,有意者请将个人简历发到:david-sun@126.com
五、国家自然科学基金项目“多源信息融合的室内移动机器人定位与导航关键技术”科普性介绍
(一)研究意义
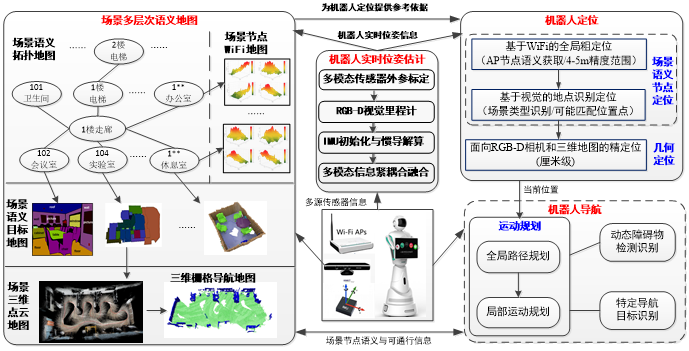
本项目针对大型室内场景相似度高、类型多样、场景时变性大、动态干扰多等问题,融合三维摄像机、IMU、WIFI等多源信息,重点开展复杂室内场景的多层次高精度三维语义地图创建技术、融合WIFI和三维视觉的机器人场景识别与精确定位、基于多模态信息融合的局部精准定位、动态目标的检测识别、动态环境下的运动规划等,提升室内环境移动机器人智能化定位和导航技术水平,改善人机语义交互的智能化体验。项目成果对推动室内移动机器人产品创新及民生方面的应用示范,促进移动机器人相关产业的快速发展具有重要的经济社会意义。
(二)研究内容
主要包括:1)融合WIFI和三维视觉信息的复杂室内场景层次式复合语义地图创建方法。2)多源信息融合的机器人语义精确定位方法。3)多源信息融合的机器人实时位姿估计。4)环境运动目标、特定导航目标检测识别、机器人运动规划方法。
(三)主要研究结果
(1)复杂室内场景机器人层次式语义地图创建
在实时高效语义分割方法研究方面,一是提出亦窄且深的实时网络设计理念,构建了适用于语义分割的实时特征提取网络(NDNet45)。相比经典网络 ,在保持分割性能可比的前提下,大大提高了语义分割效率。二是提出局部共享特征,该特征鼓励像素与其邻居间共享特征从而实现像素间结构关联的建模,可实现与 CRF(条件随机场) 媲美的语义分割后处理优化效果,且极大提高了效率。
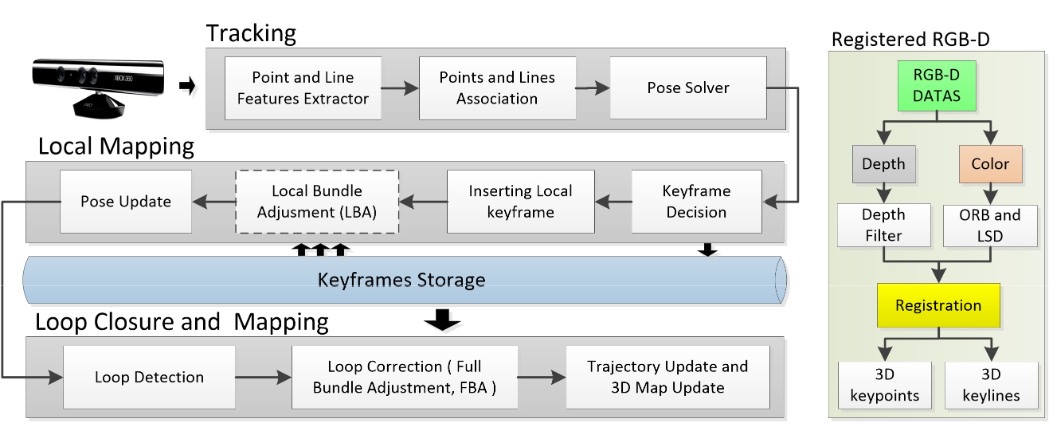
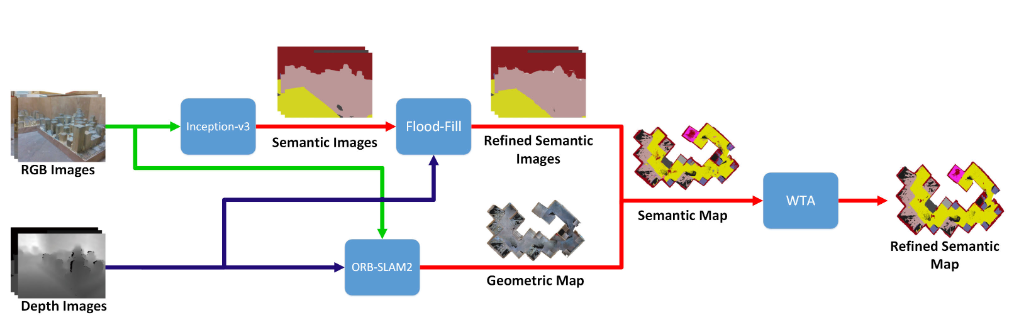
在复杂室内场景的SLAM系统研究方面,提出了适用于低纹理室内环境的鲁棒点线特征融合RGB-D SLAM系统,能够在几乎无纹理的场景中正常运行,输出6D姿态估计和3D地图。设计了用于救援机器人的语义SLAM框架,该框架不仅可以生成密集点云形式的几何地图,还可以生成由语义分割卷积神经网络(CNN)生成的相应的逐点语义标签,有效地减少了导航时间的到达时间。
(2)基于WiFi和三维视觉信息的机器人全局位置定位
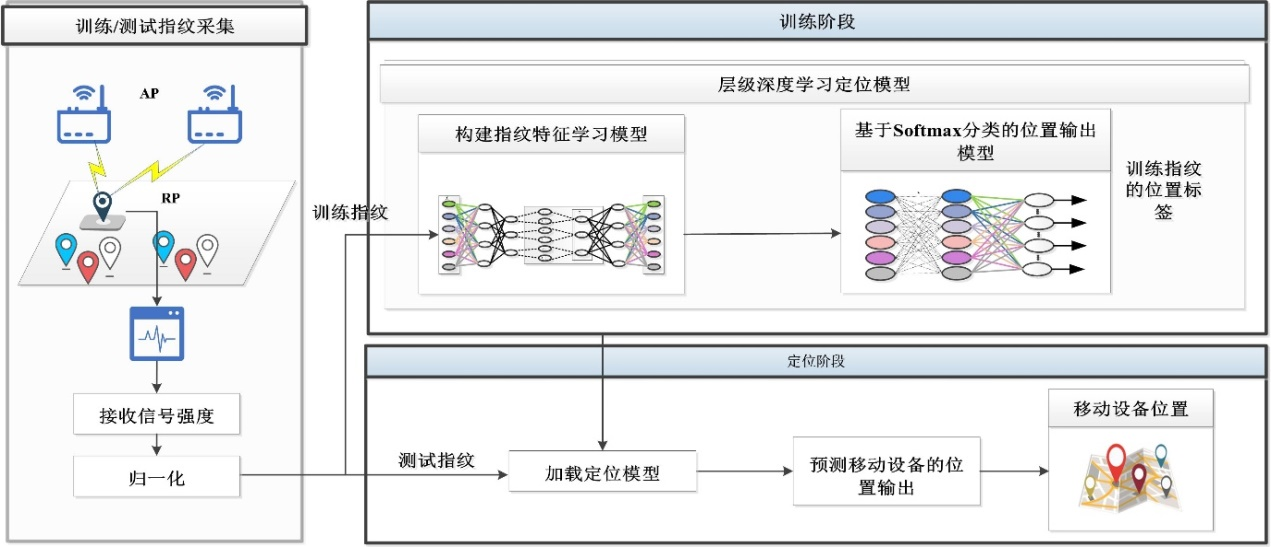
研究了基于WiFi的室内环境机器人高精度定位方法,针对WiFi的室内定位系统的精度和鲁棒性受到接收信号强度波动的严重影响,设计了一种基于指纹聚类和融合指纹自适应K近邻方法(KNN)的WiFi定位框架。在离线阶段,高斯混合模型(GMM)对离线指纹进行聚类。在线阶段,使用基于融合指纹的自适应KNN算法来估计预测子区域中的位置。提出将标准粒子群优化(SPSO)算法应用于WiFi室内定位,采用一种新的双面板指纹同质性模型来表征指纹相似性,将WiFi指纹定位的模式匹配模型转换为优化模型,通过建立合适的适应度函数并应用SPSO实现更好的性能。提出了基于非监督学习的变分自编码(VAE)模块位置识别定位。首先通过构造特征提取模型来表征定位指纹,并根据隐变量学习训练指纹的特征,然后根据位置辨识模块分析输入特征与位置输出之间的关系,并在输出层连接SoftMax分类器,预测移动设备的位置。此外,项目还研究了一个结合WiFi和视觉的序列-多决策集成方法来获取用户的位置。该方法分为顺序融合定位和自适应多决策融合定位两个阶段。前者首先使用基于WiFi的定位,然后在WiFi定位的约束条件下进行基于图像的定位和融合定位。
(3)基于多模态信息融合的机器人实时位姿估计
研究了基于RGB-D图像的实时高效6D姿态估计方法,提出DFPN-6-D网络,只需要调用一次网络就可以估计出6D物体的姿态,在取得高精度的同时,不需要完整的三维计算机辅助设计(CAD)模型信息或其他信息。针对数据驱动的实例级模型泛化性差、采集数据与训练耗时费力等问题,提出了一种基于类别级6D位姿估计的机器人多物体连续抓取方法。设计了结合全局特征与局部特征的一维残差卷积神经网络(GSENet)来充分提取CAD模型中所包含的全局形状特征,以低计算成本的方式有效的完成了多物体连续抓取。
在基于特征融合的物体6D姿态跟踪的研究方面,提出了6D目标姿态跟踪网络HFF6D,将RGB数据和深度数据(深度图)连接起来,对不同通道的数据进行融合,显式地突出了相邻帧之间的特征差异。提出了基于数据增强的合成数据生成方法,采用了一种物理上合理的域随机化(PPDR)方案,将合成数据生成过程中的物理一致性模拟和域随机化相结合,以有效地校准合成数据和真实世界数据之间的物理属性(如碰撞和重力),使HFF6D网络结构能够更容易应用于工业应用程序。
(4)大型复杂动态场景下移动机器人智能导航
在多机器人目标搜索的智能优化算法方面,针对未知环境下多机器人静态和动态目标搜索问题,提出了一种自适应机器人灰狼优化算法,较好地解决了早熟收敛问题和因目标逃逸而造成的搜索易陷入局部最优的问题。针对未知环境下多机器人系统的多目标动态任务分配和协作搜索问题,提出了一种结合动态窗口法的改进自组织映射神经网络方法,具有较高的成功率和效率,并且具有良好的鲁棒性。
研究了基于深度强化学习的机器人导航方法,提出了一种基于异构GAT的深度强化学习算法(HGAT-DRL),将受约束的人-机器人共存环境编码在由四种类型的节点组成的异构图中,提高了大型复杂动态场景下的移动机器人导航效率和成功率。为解决大多数学习方法产生巨大的计算量,提出了一种基于图的深度强化学习方法——SG-DQN,与之前的先进算法相比,所提出的算法实现了同等甚至更好的性能,而所需的计算成本却很低。
(四)项目成果转化及应用情况。
项目关键技术(室内环境三维语义地图创建、精准定位、智能化导航)应用于家庭服务机器人、专业场景服务机器人、AGV等智能移动机器人中,有效提升了产品竞争力,大大提高了产品销量,帮助相关企业取得了很好的经济效益。
