一、基本情况
欧阳博,湖南大学电气与信息工程学院副教授、博士生导师,入选湖湘青年英才,主要从事网络化协同感知、网络化多机器人协同控制等方面的科研和教学工作。近年来先后主持开展和完成国家自然科学基金、国家重点研发项目子课题等国家级项目5项、湖南省重大专项子课题、自然科学基金等省部级项目3项、国家重点实验室开放课题及横向课题多项。现为湖南大学机器人视觉感知与控制技术国家工程研究中心团队成员。
办公室:湖南大学电气与信息工程学院附310
联系邮箱:ouyangbo@hnu.edu.cn
课题组常年招收博士,硕士及本科实习生,欢迎各位学生加入我们团队!
招生专业:电气工程、控制科学与工程、能源动力、电子信息工程专业
二、学习与工作经历
学习经历
2016/11 - 2017/11,美国新泽西理工访学
2009/09 – 2014/09, 浙江大学,信息与电子工程学系,博士(直接攻博)
2005/09 – 2009/06, 浙江大学,信息学院电子信息工程系,学士
工作经历
2018/12 - 至今, 湖南大学,电气与信息工程学院,副教授
2014/10 - 2018/12, 湖南大学,电气与信息工程学院,助理教授
三、团队科研方向简介
1、网络化协同感知
(1)无线电能传输及能量自拾取技术
在工业机器人、航空航天、土木建筑、桥梁隧道等领域中,负责测量、控制、监测的电子设备的供电问题一直是一个亟待解决的难题。本课题组针对该问题展开了大量的探索和研究,提出了一种新颖的无线能量传输技术,即基于超声-射频中继的无线能量传输技术,该技术能够为极端金属环境下的电子设备提供毫瓦级的能量,有效解决了这些设备的供电问题。与此同时,考虑到环境中本身存在很多能量,本课题组对能量自拾取技术进行了深入的探索,尤其是对于环境中的振动能量采集技术进行了相关的研究,该技术通过收集电子设备所处环境中的能量为其供电,也是一种解决复杂环境中电子设备供电问题的有效思路。

(2)工业机器人减速器状态监测技术
工业机器人减速器健康状态直接决定了装备运行的精度与可靠性。传统检测技术难以穿透金属传输数据且需要破坏密封金属结构,无法满足减速器状态监测需求。我们提出了基于超声-射频中继的过金属携能通信技术,该方法过金属能量传输效率>20%,数据通信速率>20kbps,能有效实现减速器内部结构的实时状态监测。针对应变传感器特性及无线供电对无线应变传感器的功耗要求,设计了合适的信号调理及转换电路,基于误差分析方法及低功耗设计技术,对放大、滤波、模数转换等环节进行电路参数和优化,应变传感器误差≤±1%。


2、网络化多机器人协同控制
(1)多机器人死锁理论研究
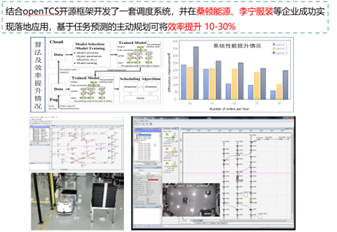
针对目前死锁避免算法约束过强,导致机器人的动作选择受到过度限制、压缩了潜在性能优化空间的问题,结合图论提出一种更为灵活的死锁避免算法。首先将系统状态表示为混合图,并分析其结构与状态安全之间的关系;再通过定义宏环结构,建立宏环压缩图以提取可能导致死锁的机器人;最后集中分析这些机器人的状态以评估系统的安全性,在此基础上设计了死锁避免算法,并从时间复杂度和行为容许度两个方面评估了所提死锁避免算法的性能。结合openTCS框架开发了一套调度系统,并在桑顿能源等企业成功实现落地应用,执行效率可提升10%-30%。

(2)面向智能制造场景的多机器人实时优化调度方法研究
近年来,多机器人系统在智能制造上受到广泛关注,通过使用机器人代替人工进行物料配送,可提高配送效率,实现配送自动化。在智能制造环境下,多机器人系统的安全稳定运行离不开有效的调度策略。然而,目前大多调度策略灵活性差,实时性不足,无法应对动态环境。提出了基于事件触发的自适应路径调整机制和基于life-long机制的连续规划调度方法,并开发了穿梭机器人高效规划与调度系统,实现了智能立库内穿梭机器人运动死锁的完全避免和立库吞吐能力的大幅提升。目前算法成功应用在工程机械龙头企业三一重工股份有限公司智能立体仓库,实现多机协作的高效任务映射与任务调度管理,仓库吞吐能力相较于现场应用算法提升20%。


四、科研项目
[1] 国家自科基金面上项目,62373139,复杂结构化环境下大规模多移动机器人的死锁及协同路径规划问题研究,2024.1-2027.12,主持
[2] 湖南省自科基金面上项目,2021JJ30146,复杂系统中的结构化资源的序贯分配问题研究,2021.1-2023.12,主持
[3] 湖南省科技创新重大项目,2021GK1010,面向智能制造的自主可控工业互联网关键技术研究与应用示范,2022-01至2024-12,参与.
[4] 湖湘青年英才荷尖人才,2023RC3121,2023.10-2025.9,主持.
[5] 科技部重点研发项目,2021YFB2012102,适应减速器内部环境的无线应变传感器设计制造及测量技术,2021-11至2024-10, 参与.
五、科研成果
1、代表性论文
[1] He D, Ouyang B*, Fan H, Hu C, Zhang K, & Yan Z, et al. Deadlock Avoidance in ClosedGuide-Path Based MultiAGV Systems[J]. IEEE Transactions on Automation Science and Engineering,2022.
[2] Fan H, Ouyang B*, Yan Z, & Wang Y, et al. lmprove scheduling in Multi-AGV systems by task prediction[J]. Journal of Scheduling, 2023.
[3] 陈果,何代钰,欧阳博*,颜志,文蔚,饶有福,王耀南.基于链状结构保持的多AGV系统灵活高效死锁避免控制策略研究[J],机器人学报,2023.
[4] Z. Yan, B. Ouyang, D. Li, H. Liu and Y. Wang, "Network Intelligence Empowered Industrial Robot Control in the F-RAN Environment," in IEEE Wireless Communications, vol. 27, no. 2, pp. 58-64, April 2020.
[5] Y. Wei, X. Liu, B. Ouyang. Link prediction based on network embedding and similarity transferring methods. Modern Physics Letters B 34.16 (2020): 2050169. SCI,通讯作者
[6] Bo Ouyang*, Qiang Ye, Siddharth Patil, Cong Wang, Lu Lu and Zhi Yan, The Relation between communication range and controllability of networked multi-agent Systems, IEEE Access, 6:35901 - 35907, 11 June, 2018.
[7] Bo Ouyang, Yongxiang Xia*, Cong Wang, Qiang Ye, Zhi Yan, and Qiu Tang, Quantifying importance of edges in networks, IEEE Transactions on Circuits and Systems II: Express Briefs, 65(9):1244 - 1248, 27 March, 2018.
[8] Bo Ouyang*, Zhaosheng Teng, Qiu Tang, Dynamics in Local Influence Cascading Models, Chaos, Solitons & Fractals, 93:182-186, December, 2016.
[9] Bo Ouyang*, Siddharth Patil, Cong Wang, Lu Lu, Controllability of Networks with Multivariable Agents, ACC (American Control Conference), June 27-29, Milwaukee, WI, USA, 2018.
[10] Leidi Zhao,Raheem Lawhorn, Siddharth Patil, Steve Susanibar, Steve Susanibar, Lu Lu, Cong Wang*, Bo Ouyang, Robot Composite Learning and the Nunchaku Flipping Challenge, ICRA (IEEE International Conference on Robotics and Automation) 2018.
[11] Bo Ouyang*, Lurong Jiang, Zhaosheng Teng, A Noise-Filtering Method for Link Prediction in Complex Networks, Plos One, 11(1), Jan 2016.
[12] Bo Ouyang, Xinyu Jin, Yongxiang Xia, Lurong Jiang, Change of network load due to node removal, European Physical Journal B, 87(3): 1–6, 2014.
[13] Bo Ouyang, Xinyu Jin, Yongxiang Xia, Lurong Jiang, Duanpo Wu, Dynamical interplay between epidemics and cascades in complex networks, Europhysics Letters, 106(2): 28005, 2014.
2、发明专利与软件著作权
[1] 基于行为依赖图的多车型协同分拣调度方法, ZL 20221 0668154.2.(已授权)
[2] 基于拓扑地图的多移动机器人调度方法及系统,ZL202110756841.5.(已授权)
[3] 多AGV协同调度仿真平台及仿真方法, ZL 2023 1 0413805.8.(已授权)
[4] 用于复杂有轨传输系统的调度方法,202011175103.3,(已授权)
[5] 基于 openTCS 的多AGV调度软件, 软件著作权, 2021.
[6] 基于 Python 的多AGV调度仿真软件, 软件著作权, 2021.
[7] 考虑运动学的无碰撞路径规划调度系统V1.0, 软件著作权, 2023.
3、荣誉获奖
[1] 湖湘青年英才项目,部省级,2023年,排名第一.
[2] 湖南大学2022年度教学优秀奖;校级;2022年,排名第一.
[3] “电气与信息融合的本硕博一体化培养模式探索与实践”获湖南大学教学成果二等奖(成果主要完成人)
[4] 大学生创新创业训练计划项目2项(均获省级立项)
[5] 指导了2项研究生电子设计竞赛(获华中分赛区三等奖及龙芯企业命题三等奖)
六、实验室环境


