一、基本情况
谭浩然,男,博士,中共党员,湖南大学副教授,博士生导师,任机器人视觉感知与控制技术国家工程研究中心主任助理、智能制造研发部部长,智能制造湖南省重点实验室(潇湘实验室)副主任。湖南省杰出青年基金获得者、湖南省青年科技人才(荷尖人才)获得者、湖湘青年英才计划入选者、国家博士后科学基金简介入选者。担任控制与决策、IEEE TCNS、IEEE Transactions on Circuits and Systems I: Regular Papers、Information Sciences等国内外期刊审稿人,IEEE Member,中国自动化学会高级会员,中国人工智能学会会员。现为湖南大学王耀南院士团队核心成员。
联系方式:18684965736(微信同号);Email:tanhaoran@hnu.edu.cn
常年招收硕士、博士和博士后,欢迎各位学生提前联系、咨询、报考!
办公室:湖南大学电气与信息工程学院406/机器人视觉感知与控制技术国家工程研究中心504
二、学习与工作经历
2022.12-至今,湖南大学,机器人视觉感知与控制技术国家工程研究中心主任助理,智能制造研发部部长
2022.12-至今,湖南大学,智能制造湖南省重点实验室(潇湘实验室)副主任
2021.12-至今,湖南大学,电气与信息工程学院,副教授
2020.12-2021.12,湖南大学,机器人视觉感知与控制技术国家工程实验室,副研究员
2019.08-2021.12,湖南大学,电气与信息工程学院,博士后,合作导师:王耀南教授 中国工程院院士
2015.07-2019.01,哈尔滨工业大学,航天学院,学术交流,指导老师:刘国平教授 欧洲科学院院士
2014.09-2019.06,中南大学,自动化学院,博士
2011.09-2014.06,中南大学,信息科学与工程学院,硕士
三、研究方向与成果
1.研究方向
[1] 集群机器人运动规划与网络化协同控制
[2] 智能制造机器人系统与装备
[3] 云边端工业互联网平台技术
2.近年来主持项目10项,参与项目9项,主要包括
[1] 国家自然科学基金面上项目:长柔性部件搬运云机器人高效路径规划与协作柔顺控制方法研究,2025-2028,主持;
[2]湖南省杰出青年科学基金项目:重大装备制造群智机器人动态规划与协同控制系统,2023-2025,主持;
[3]国家自然科学基金重大项目:面向重大装备制造的集群机器人协同控制基础理论与关键技术研究,2023-2027,子课题负责人;
[4]国家自然科学基金青年项目:基于网络化云边融合的多移动机器人协作数据驱动控制方法研究,2022.01-2024.12,主持;
[5]湘江实验室开放基金:面向智能制造的网络化集群机器人协作控制方法研究,2023.01-2023.12,主持;
[6]湖南省自然科学基金青年项目:复杂网络环境下基于无模型自适应的非线性MIMO异构多智能体协调控制方法研究,2021.01-2023.12,主持;
[7] 中国博士后科学基金特别资助项目:云计算框架下多移动机器人数据驱动协作控制方法及应用研究,结题,主持;
[8] 中国博士后科学基金面上资助项目:面向疫情防控的无模型云机器人自适应协作控制研究,结题,主持;
[9] 国家重点研发计划项目:面向船舶制造过程管控平台开发及应用示范,2020.11-2023.10,参与/课题联系人;
[10] 湖南省科技重大专项:面向智能制造的自主可控工业互联网关键技术研究与应用示范,2022.01-2024.12,项目总助理/课题负责人;
[11] 国家自然科学基金重点项目:高端制造视觉感知与灵巧作业控制,2018.01-2022.12.31,核心成员;
3.荣誉获奖
[1]2022年国家教学成果二等奖
[2]2023年湖南省杰出青年科学基金获得者
[3]2022年湖南省青年科技人才(荷尖人才)
[4]2022年第十三届湖南省高等教育教学成果特等奖
[5]2021年度中国博士后科学基金资助者选介
[6]2021年度湖南大学教学成果一等奖
4. 学生培养
[1] 第三届工业数字孪生大赛全国三等奖指导老师
[2] 2023全国人工智能应用创新挑战赛优胜奖指导老师
[3] 本科优秀实习教师
四、科研成果
近年来在IEEE trans汇刊、控制与决策等期刊与会议上发表SCI/EI论文50余篇,申请/授权发明专利35项,授权软件著作权6项。
1. 代表性论文
[1] Jiao Jiang, Yaonan Wang, Yiming Jiang, He Xie,Haoran Tan, Hui Zhang. A Robust Visual Servoing Controller for Anthropomorphic Manipulators With Field-of-View Constraints and Swivel-Angle Motion: Overcoming System Uncertainty and Improving Control Performance,IEEE Robotics & Automation Magazine. DOI: 10.1109/MRA.2022.3198368
[2] Yang Yang, Ailing Wang,Haoran Tan, Wenbin Yue, Aijia Xin. Output Consensus of General Linear Networked Multiagent Systems With Unknown Disturbances via Cloud Computing,IEEE Systems Journal,Early Access, 2022(SCI二区,IF: 3.931)
[3]Haoran Tan,Yaonan Wang, et. al.Coordination of low-power nonlinear multi-agent systems using cloud computing and a data-driven hybrid predictive control method,Control Engineering Practice, 108:104722, 2021(SCI二区,IF: 3.475)
[4]Haoran Tan,Yaonan Wang, et. al. Distributed Group Coordination of Multiagent Systems in Cloud Computing Systems Using a Model-free Adaptive Predictive Control Strategy,IEEE Transactions on Neural Networks and Learning Systems,Early Access, 2021(SCI一区,IF: 10.451)
[5] Zhiqiang Miao, Hang Zhong, Yaonan Wang, Hui Zhang,Haoran Tan, Rafael Fierro, Low Complexity Leader-Following Formation Control of Mobile Robots Using Only FOV-Constrained Visual Feedback,IEEE Transactions on Industrial Informatics,Early Access, 2021(SCI一区,IF: 10.215)
[6]Haoran Tan, Zhiqiang Miao, Yaonan Wang, et. al. Data-Driven Distributed Coordinated Control for Cloud-Based Model-Free Multiagent Systems With Communication Constraints,IEEE Transactions on Circuits and Systems I: Regular Papers,67(9): 3187-3198, 2020 (SCI一区,IF: 3.943)
[7]Haoran Tan, Zhiwu Huang, et. al. Data-Based Predictive Control for Networked Nonlinear Multi-agent Systems Consensus Tracking via Cloud Computing,IET Control Theory and Applications,13(5): 683-692, 2019(SCI二区,IF: 3.527)
[8] Haoran Tan*,Zhiwu Huang, et. al. An Interactive Real-time SCADA Platform with Customizable Virtual Instruments for Cloud Control Systems,Journal of Dynamic Systems, Measurement, and Control-Transactions of The ASME, 141(4): 044501, 2019(SCI四区,IF: 1.521)
[9]谭浩然*,黄志武,等.基于云控制系统的监控系统设计与实现,控制与决策,34(8): 1688-1694, 2019(EI)
[10]Haoran Tan, Zhiwu Huang, et. al , Development of A Customizable Real-time Monitoring System for Networked Control Systems,The 37thChinese Control Conference, 2018.7.25, Wuhan
[11]Haoran Tan*,et. al. Coordinated Control for Multi-agent Systems Based on Networked Predictive Control Schemes,2016 Chinese Control and Decision Conference, 2016.05.02, Yinchaun
2. 国家发明专利
近年来申请/授权国家发明专利35项,部分专利如下:
[1] 一种面向长柔性部件抓取搬运的全向移动复合机器人
[2] 一种多机协同转体大型工件的数据驱动二分一致控制方法,授权
[3] 一种多机器人协同搬运力位混合控制方法,授权
[4] 一种预瞄机制下网络化多机器人数据驱动编队控制方法,授权
[5] 一种多机器人协同磨抛航空叶片装置及方法,授权
[6]一种低复杂度的移动机器人视觉伺服编队控制方法,授权
[7] 一种医药异物高光谱分类检测方法,授权
[8] 一种软包电池传感器故障在线检测方法 ,授权
[9] 一种LCD显示屏成品瑕疵检测成像装置及方法,实审中
[10] 一种基于注意力机制和霍夫投票的目标位姿估计方法及系统,实审中
[11] 一种基于机器视觉的紧固件计数设备及方法,实审中
[12] 一种基于多机器人协同的航空叶片磨抛装置及控制方法,实审中
3. 软件著作权
[1] 基于数字孪生的机器人三维测量软件
[2] 面向LCD屏幕检测的多层次瑕疵智能识别系统
[3]多传感器融合的钢直尺自动检定系统
[4] 康托网络化可视监控组态软件
[5] NetCon-ARM9网络化可视控制组态接口软件
4. 参与标准制定
[1] 国家标准:工业互联网平台 技术要求及测试方法 第1部分:总则。标准编号:GB/T 44067.1-2024
[2] 国家标准:工业互联网平台 技术要求及测试方法 第2部分:工业PaaS平台。标准编号:GB/T 44067.2-2024
5. 实验平台与机器人装备研发
(1)多机器人路径规划云平台
使用 TurtleBot4移动机器人为主体,部署有高精度运动捕捉系统采集场景信息,并结合ROS2平台搭建有多机器人路径规划与协同控制方法验证平台

(2)多机器人协同抓取搬运平台
针对飞机长桁等长柔性部件的搬运需求,自主研制了搭载梅卡曼德相机、全向舵轮结构的长桁搬运机器人,满足抓取、协同搬运等制造任务需求。

自主研发全向移动底盘与自主设计末端夹爪
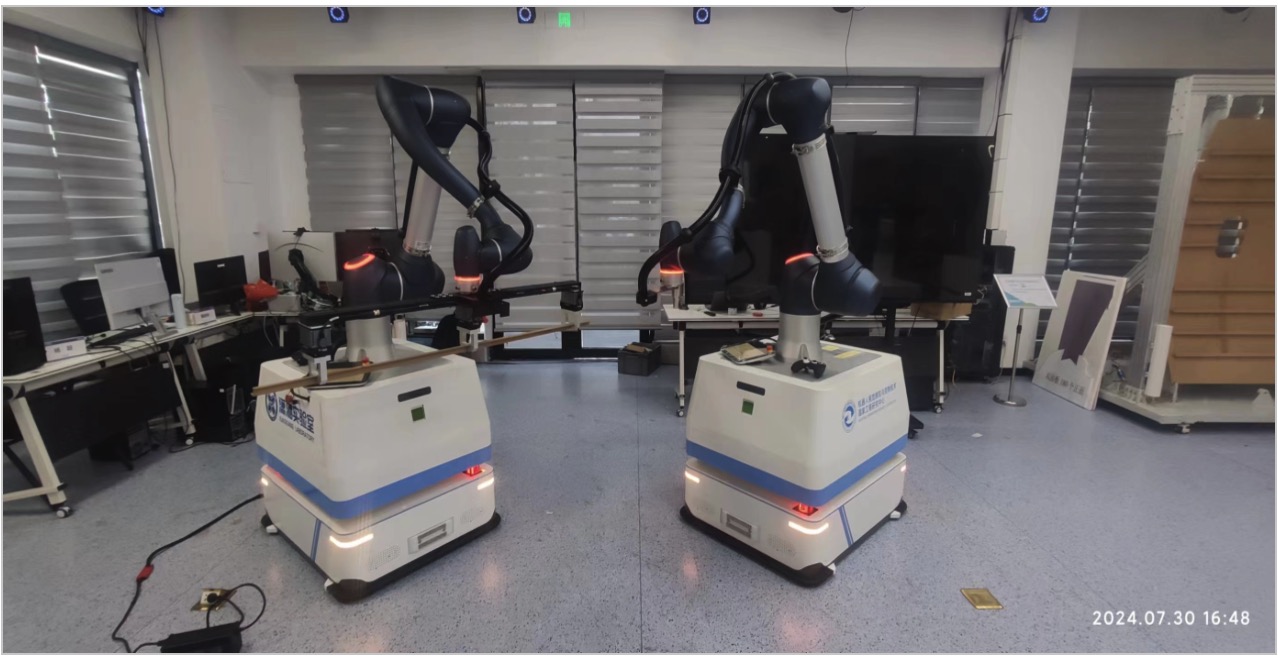
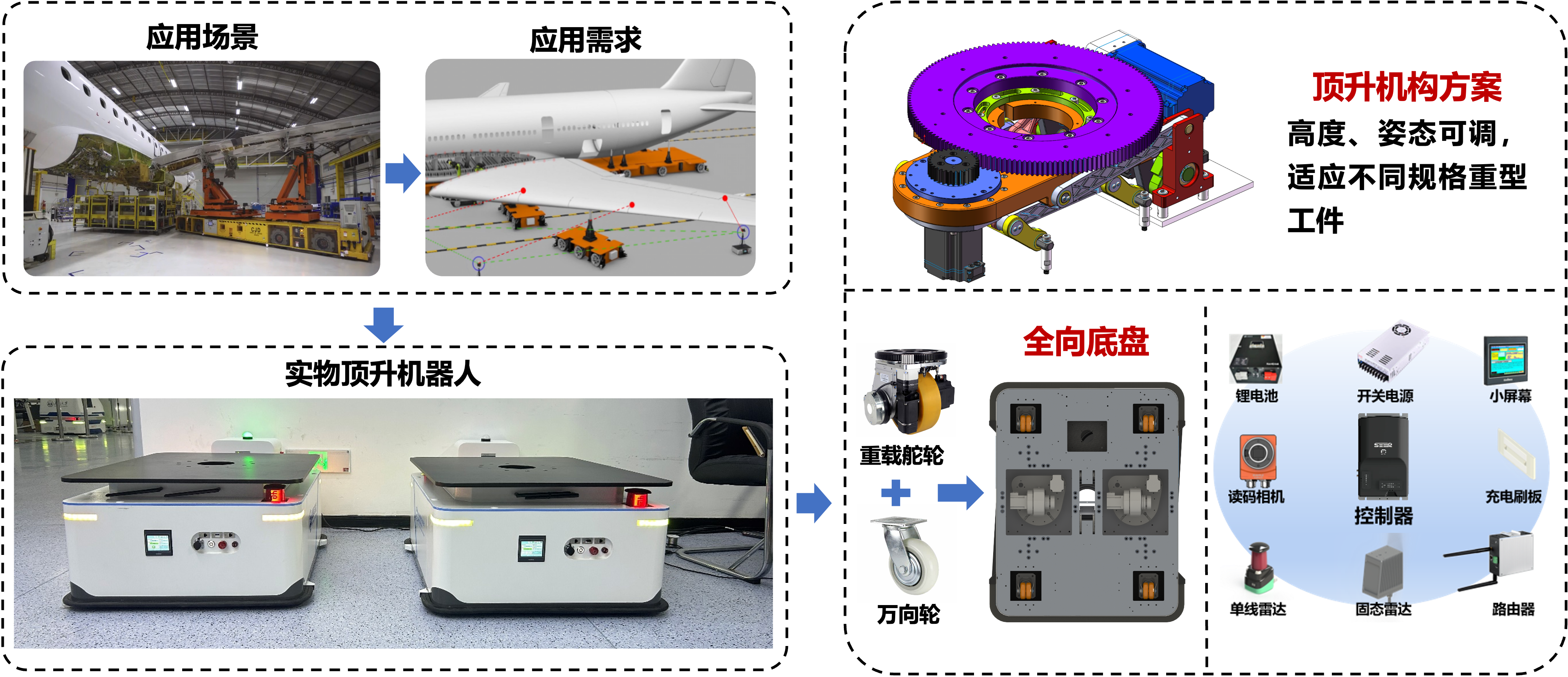
(3)重型工件机器人搬运平台
针对重型工件高精度协同搬运、机身机翼对接调资需求,自主研制了带有双舵轮结构和顶升结构的顶升机器人,实现重型工件的稳定搬运和姿态配准。
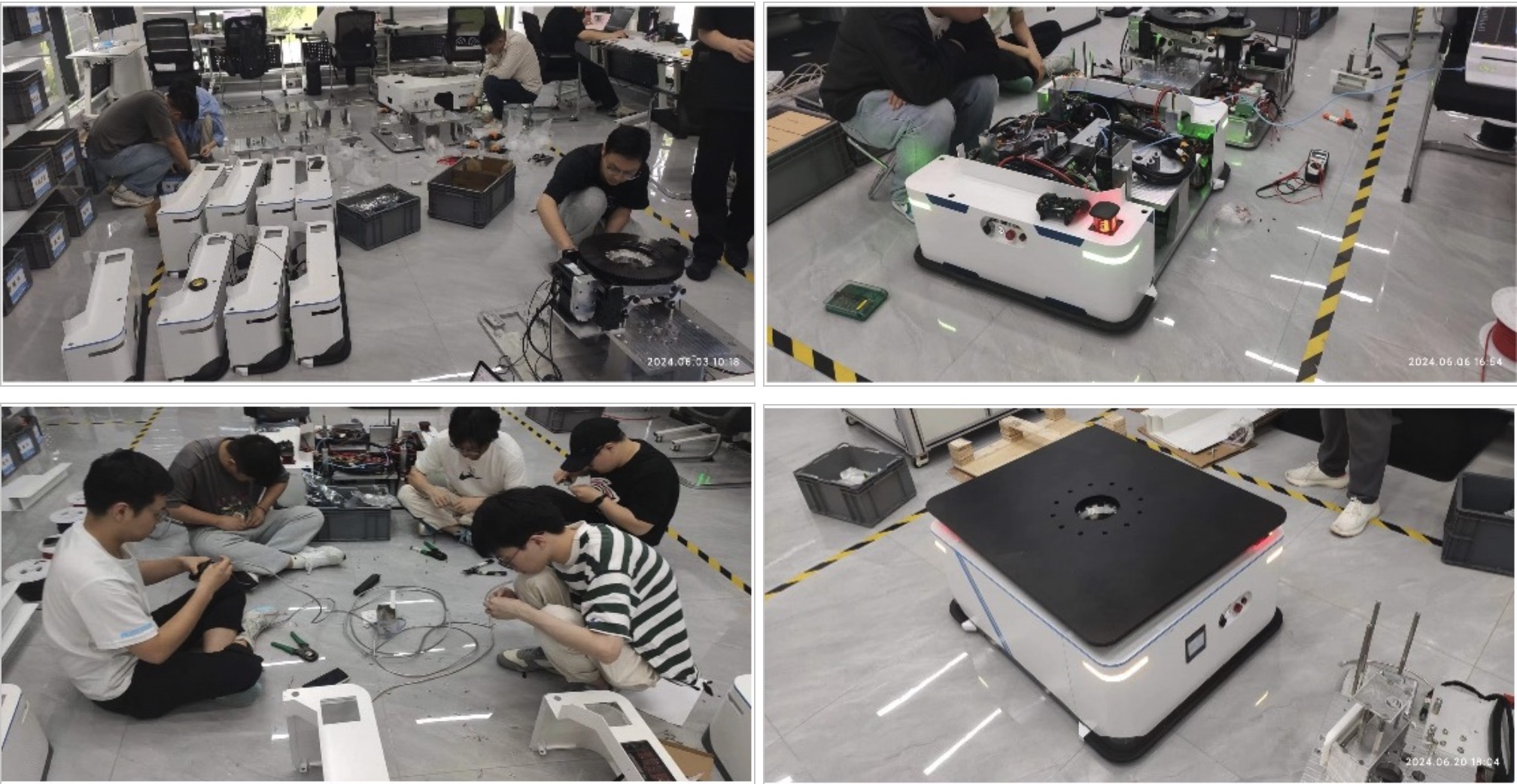
团队合影:

