一、基本情况
冯运,男,博士,中共党员,湖北黄冈人,副教授,博士生导师,控制科学与工程系副主任,机器人视觉感知与控制技术国家工程研究中心核心骨干,第八届中国科协青年人才托举工程入选者,湖南省青年科技人才(荷尖人才)获得者、湖湘青年英才计划入选者。以第一/通讯作者在Automatica和IEEE Trans等自动化领域Top期刊发表高水平学术论文20余篇,获2023年度中国自动化学会科技进步一等奖、中国自动化学会青年学术年会YAC 2021最佳论文奖,已授权国家发明专利12项、软件著作权2项。近年来主持国家重点研发计划项目课题、国家自然科学基金面上、青年项目、教育部产学合作协同育人项目、JKW 1X3技术领域基金课题、湖南省自然科学基金面上、青年项目、博士后国际交流计划、面上项目,湘江实验室开放基金项目,作为核心骨干参与国家自然科学基金重大项目、湖南省自然科学基金重大项目等多项国家级和省部级重大重点项目。现担任《Franklin Open》期刊副主编,中国自动化学会高级会员、中国自动化学会大数据专业委员会委员、青年工作委员会委员、中国指挥与控制学会青年工作委员会委员、湖南省自动化学会理事、湖南省信息技术标准化技术委员会专家、IEEE Technical Committee on Distributed Parameter Systems Member等。
常年招收硕士、博士和博士后,欢迎提前联系和咨询!
(2025年还有研究生招生指标,微信号:VonLuck。尊重学生想法,根据学生个人兴趣和职业发展规划进行针对性地指导,包括但不限于1V1 meeting,论文讨论与修改。课题组给参加项目科研的研究生提供额外的科研补助,对有志于继续深造读博的学生提供推荐和指导。指导的研究生毕业后已进入东风集团、长沙银行等大型企业工作。)
电子邮箱:fyrobot@hnu.edu.cn
谷歌学术:https://scholar.google.com.hk/citations?user=iTig878AAAAJ&hl=zh-CN
ResearchGate: https://www.researchgate.net/profile/Yun-Feng-13
二、学习与工作经历
2022.10-至今,湖南大学,电气与信息工程学院,副教授,控制科学与工程系副主任(科研与人才引进)
2022.10-至今,湖南大学,机器人视觉感知与控制技术国家工程研究中心,研究员
2020.08-2022.09,湖南大学,电气与信息工程学院,博士后/助理研究员,导师:王耀南教授(中国工程院院士)
2019.07-2019.11, 德国杜伊斯堡-埃森大学,自动控制及复杂系统研究所,访问,导师:Prof. Steven Ding
2017.09-2020.08, 香港城市大学,系统工程及工程管理,博士,导师:李涵雄教授(IEEE Fellow, 讲席教授)
2014.09-2017.06, 武汉大学,控制理论与控制工程,硕士
2010.09-2014.06, 武汉大学,自动化, 学士
三、主要研究方向
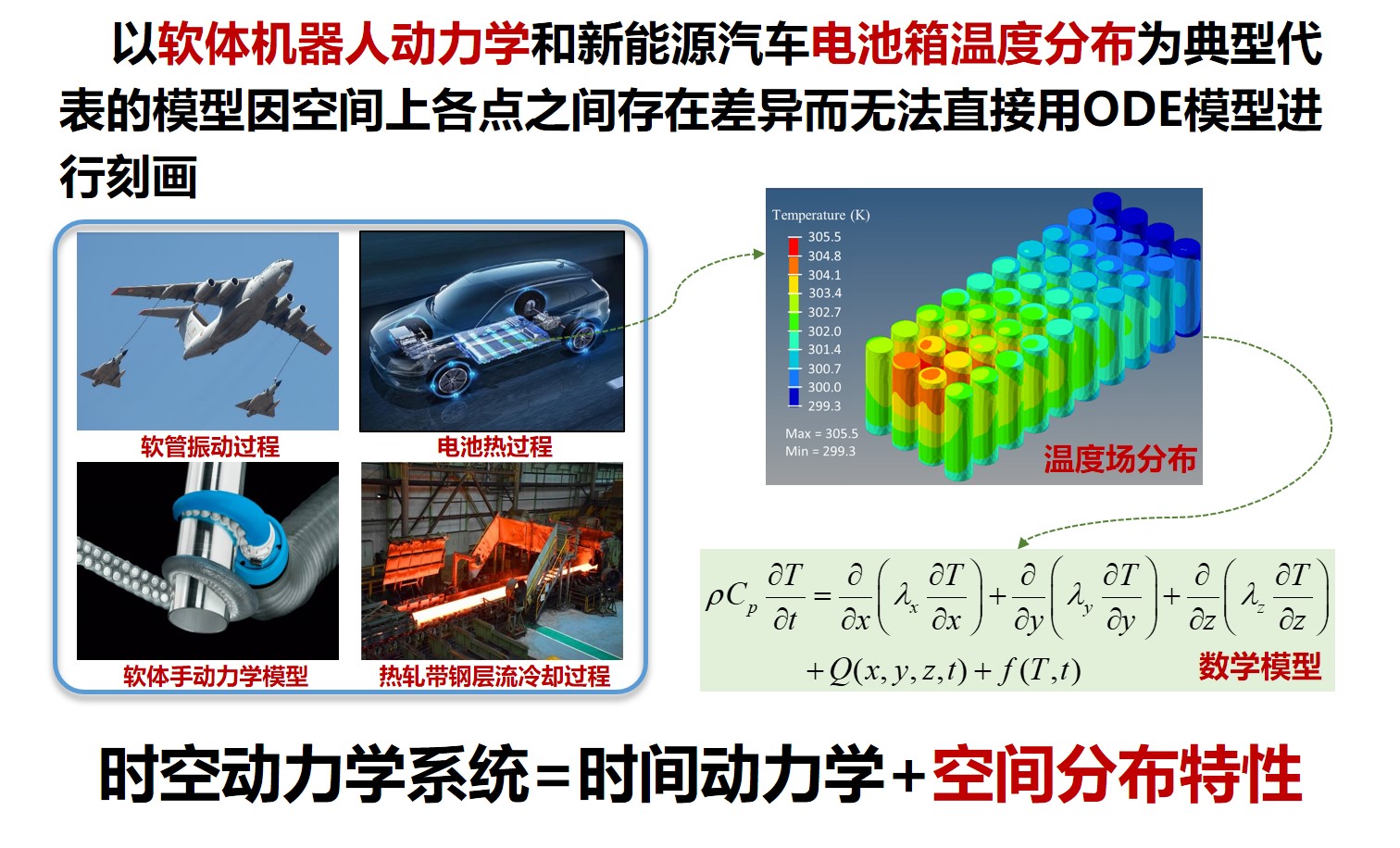
软体/连续体机器人建模与控制、机器人数字孪生与健康管理、机器学习与智能优化理论及应用
四、学生指导
[1] 指导研究生参加第三届工业数字孪生大赛全国总决赛获三等奖(全国仅5名)
[2] 指导研究生参加首届全国人工智能应用场景创新挑战赛获种子组优胜奖(前5%)
[3] 2024年湖南省研究生科研创新项目指导老师
[4] 2024年大学生创新创业训练计划(SIT)省级项目2项,校级项目1项指导老师
五、代表性科研项目
[1] 国家自然科学基金面上项目:复杂工业时空动态系统智能建模与异常诊断,2025.01-2028.12,主持
[2] 国家重点研发计划“智能机器人”重点专项:高机动仿昆虫微型扑翼飞行机器人基础理论和关键技术研究,2024.01-2026.12,课题主持
[3] 国家自然科学基金青年项目:网络攻击下多机器人协作系统主动自愈合控制方法研究,2023.01-2025.12,主持
[4] 教育部产学合作协同育人项目(固高科技公司):智能控制课程建设和课程体系改革,2024.09-2025.08,主持
[5] 湖南省自然科学基金面上项目:多机器人协作系统弹性控制方法研究,2024.01-2026.12,主持
[6] 湖南省自然科学基金青年项目:工业分布式参数过程在线智能辨识与异常诊断研究,2021.01-2023.12,主持
[7] 中国博士后科学基金面上项目:多机器人协作系统网络攻击检测和自愈合控制研究,2021.12-2022.08,主持
[8] 国家自然科学基金重大:重大装备制造的集群机器人关键技术验证与应用,2023.01-2027.12,课题技术负责人
[9] 湖南省科技重大专项:面向智能制造的自主可控工业互联网关键技术研究与应用示范,2022.01-2024.12,骨干
[10] 湖南省自然科学基金重大项目(揭榜制):高端智能超精密磨削装备设计与制造关键技术研究,2021.07-2024.06,课题技术负责人
六、荣誉获奖
[1] 2023年 中国自动化学会科技进步一等奖(10/15)
[2] 2023年 入选中国科协青年人才托举工程(中国自动化学会推荐,中国科协资助名额)
[3] 2021年 第36届中国自动化学会青年学术年会(YAC 2021)最佳理论论文(第一作者)
七、科研成果
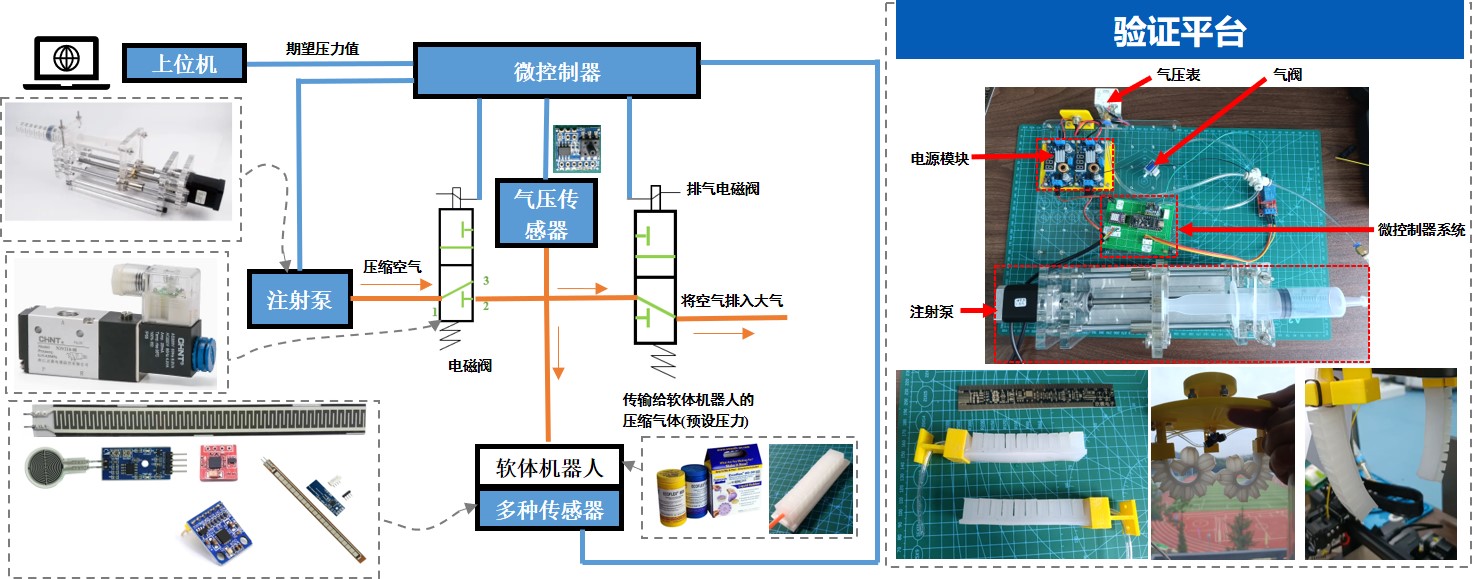
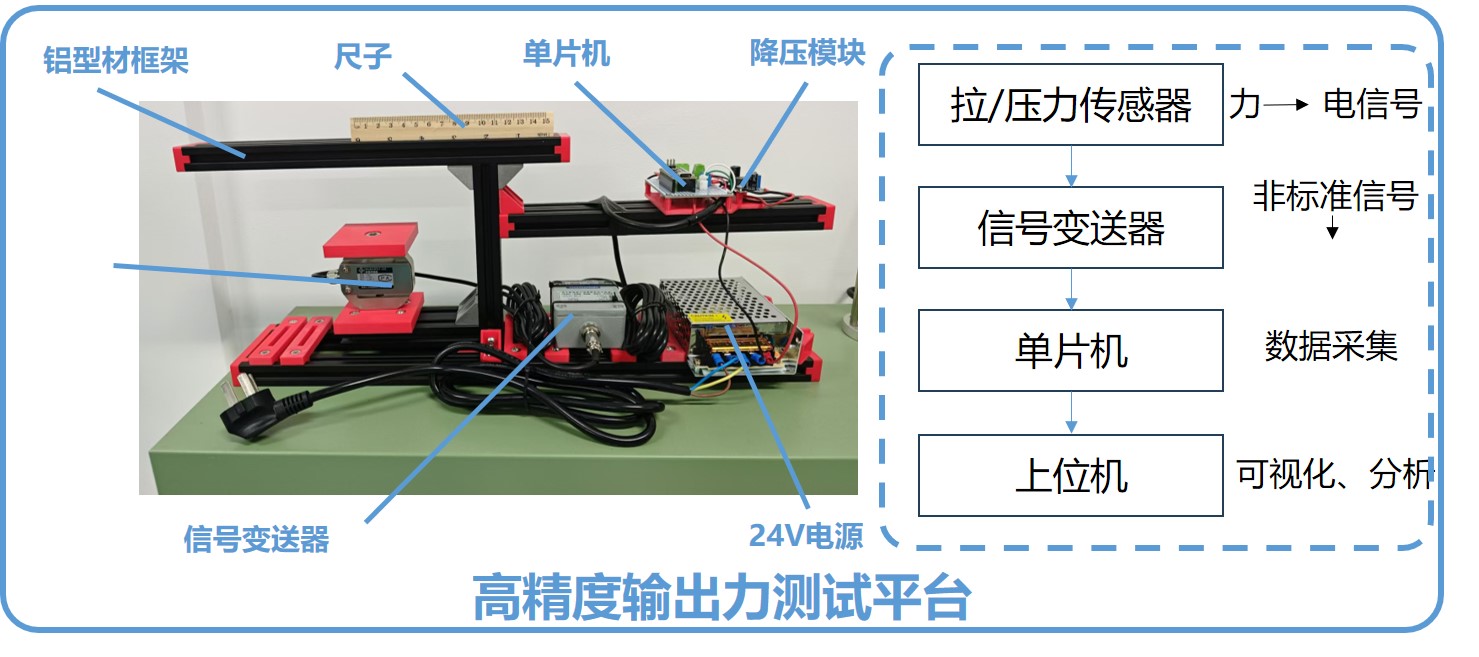
一. 软体机器人样机及系统

二. 集群机器人数字孪生系统
1. 代表性论著
[1] Feng, Y., Zhu, X. , Wang, Y., Wang, B. C. , Zhang, H., Wu, Z. G., & Yan, H. (2023). PDE model-based on-line cell-level thermal fault localization framework for batteries. IEEE Transactions on Systems, Man, and Cybernetics: Systems.
[2] Feng, Y., Wang, Y., Wang, B. C. , & Li, D. (2023). Optimized weights for heterogeneous epidemic spreading networks: A constrained cooperative coevolution strategy. IEEE Transactions on Computational Social Systems.
[3] Feng, Y., Wang, Y., Mo, Y., Jiang, Y., Liu, Z., He, W., & Li, H. X. (2023). Computation-efficient fault detection framework for partially known nonlinear distributed parameter systems. IEEE Transactions on Neural Networks and Learning Systems.
[4] Feng, Y., Wang, Y. , Wang, J. W. , & Li, H. X. (2022). Backstepping-based distributed abnormality localization for linear parabolic distributed parameter systems. Automatica, 135, 109930.
[5] Feng, Y., Wang, Y. , Wang, B. C., & Li, H. X. (2022). Spatial decomposition-based fault detection framework for parabolic-distributed parameter processes. IEEE Transactions on Cybernetics, 52(8): 7319-7327.
[6] Feng, Y., Wang, Y., Wan, Q., Zhang, X., Wang, B. C., & Li, H. X. (2022). From on-line systems modeling to fault detection for a class of unknown high-dimensional distributed parameter systems. IEEE Transactions on Industrial Electronics, 70(5): 5317-5325.
[7] Feng, Y., Li, H. X., & Yang, H. D. (2021). Abnormal source identification for parabolic distributed parameter systems. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 51(9), 5698-5707.
[8] Feng, Y., & Li, H. X. (2019). Dynamic spatial-independent-component-analysis-based abnormality localization for distributed parameter systems. IEEE Transactions on Industrial Informatics, 16(5), 2929-2936.
[9] Feng, Y., & Wang, B. C. (2019). A unified framework of epidemic spreading prediction by empirical mode decomposition-based ensemble learning techniques. IEEE Transactions on Computational Social Systems, 6(4), 660-669.
[10] Feng, Y., & Li, H. X. (2019). Detection and spatial identification of fault for parabolic distributed parameter systems. IEEE Transactions on Industrial Electronics, 66(9), 7300-7309.
2.发明专利(公开17项,授权12项)及软件著作权(授权2项)
[1] 一种外形可定制的气动软体执行器、软体机器人, 实审中
[2] 一种模块化的变刚度气动软体执行器、软体机器人, 实审中
[3] 一种基于物理信息神经网络的磨床砂轮剩余寿命预测方法, 实审中
[4] 一种圆柱形锂离子电池热异常检测与定位方法,授权
[5] 一种软包电池传感器故障在线检测方法,授权
[6] 一种基于滑动窗口的刀具剩余使用寿命实时预测方法,授权
[7] 一种多工况下轴承的状态监测与故障诊断方法,授权
[8] 一种多机器人协同搬运力位混合控制方法,授权
[9] 一种基于视觉示教和虚实迁移的机器人强化学习装配的方法,授权
[10] 一种多模态分层融合的人机交互方法和系统,授权
软件著作权
[1] 基于在线学习的刀具剩余使用寿命多步预测系统V1.0
[2] 面向LCD屏幕检测的多层次瑕疵智能识别系统V1.0
