莫洋,男,博士,中共党员,1991年生,籍贯湖南常德,湖南大学副教授,博士生导师,机器人视觉感知与控制技术国家工程研究中心研究员,主任助理,无人系统研发部部长。中国指挥与控制学会青年工作委员会常务委员,中国自动化学会青年工作委员会委员,中国仿真学会智能无人系统建模仿真专委会委员,CCF人工智能与模式识别专委会多智能体系统学组委员,IEEE Young Professionals。长期致力于无人系统感知与控制技术研究和工程应用,作为负责人主持国家自然科学基金项目、军委科技委基础计划重点基础研究项目课题、军委科技委XX6工程主题项目、军委科技委GF创新特区项目课题等6项,作为核心骨干参与国家重点研发计划项目、国防基础科研项目,载人航天型号项目等10余项。
获军队科技进步二等奖1项,作为副主编出版教材1部,指导学生获“航天三江杯”第八届中国研究生未来飞行器创新大赛全国二等奖。相关研究成果在Science杂志航天领域合作期刊、IEEE TNNLS、IEEE TIE、IEEE TIM等期刊发表高水平论文20余篇,申请/授权国家发明专利10余项,软件著作权6项。研究成果被Science/AAAS官方媒体报道和推介,成功应用于天宫二号空间实验室、中国空间站、南部战区陆军某集团军等,新闻联播进行了重点报道。
联系方式:13467636691(微信同号)
Email:moyanghnu@hnu.edu.cn
办公室:湖南大学机器人视觉感知与控制技术国家工程研究中心504
2023.01-至今,机器人视觉感知与控制技术国家工程研究中心,研究员、主任助理、无人系统研发部部长
2023.01-至今,湖南大学,电气与信息工程学院,副教授
2020.09-2023.01,机器人视觉感知与控制技术国家工程实验室,副研究员
2020.09-2023.01,湖南大学,电气与信息工程学院,博士后,合作导师:王耀南 教授 (中国工程院院士)
2016.09-2020.09,北京理工大学,机械工程,博士,导师:杨宏 研究员(中国工程院院士)
2013.09-2016.03,北京理工大学,机械工程,硕士,导师:蒋志宏 教授
2009.09-2013.06,北京理工大学,机械电子工程,本科
特种机器人;自主智能无人系统;机器人运动控制、视觉感知及柔顺作业等
常年招收博士后、博士、硕士及本科实习生。依托机器人视觉感知与控制技术国家工程研究中心,欢迎对空间特种机器人、无人系统等领域感兴趣,数学理论基础好,编程实践能力强(C++,ROS,Python,Matlab等),自动化、计算机、电子信息、机械电子等相关专业的学生报考硕士和博士研究生。
近年来主持项目6项,参与项目13项,个人承担经费近1000万元,主要包括:
[1] JKW XX3重点基础研究项目,无人集群系统XXX,课题主持,在研;
[2] JKW XX6工程项目,面向海战场XXX,项目主持,在研;
[3] JKW GF创新特区项目,目标景像XXX,课题主持,在研;
[4] 国家自然科学基金青年项目,面向空间站特殊环境下任务操作的双臂机器人感知与控制方法研究,项目主持,在研;
[5] 湖南省自然科学基金青年项目,空间特殊环境下机器人视觉感知与运动控制方法研究,项目主持,在研;
[6] 中国博士后科学基金面上项目,空间双臂机器人在轨维护作业视觉感知与柔顺控制研究,项目主持,在研;
[7] JKW XX6工程项目,面向智能指控XXX,项目助理/核心骨干,已结题;
[8] 湖南省自然科学基金重大项目,全天候多工况智能感知与信息处理关键技术及应用研究,项目助理/核心骨干,在研;
[9] 中国工程院战略研究与咨询项目,智能机器人系统xxx发展战略研究,项目助理/核心骨干,已结题;
[10] 国家重点研发计划智能机器人专项项目,人机互助型冗余灵巧作业机器人关键技术与应用验证,参与,已结题;
[11] 国防科工局稳定支持科研项目,面向空间在轨组装作业的机器人多指灵巧手自主柔顺控制技术研究,参与,在研;
[12] 国家自然科学基金共融机器人重大研究计划,面向生物疫苗制造的配药制药共融机器人关键技术研究,参与,在研;
[13] 国家自然科学基金重点项目,机器人宇航员空间站仿人作业理论与方法,参与,已结题;
[14] 国家863计划重点项目,面向卫星的移动操作臂柔性装配关键技术与应用示范,参与,已结题;
[15] 中国载人航天工程921型号项目,天宫2号空间实验室XXX系统,项目助理/核心骨干,已结题
近年来在Science杂志航天领域合作期刊、IEEE TNNLS、IEEE TIE、IEEE TIM等期刊发表高水平论文20余篇,申请/授权发明专利10余项,授权软件著作权6项。
1. 代表性论文
[1] Yun Feng, Yaonan Wang, Yang Mo*, Yiming Jiang*, Zhijie Liu, Wei He, Han-Xiong Li. Computation-Efficient Fault Detection Framework for Partially Known Nonlinear Distributed Parameter Systems[J]. IEEE Transactions on Neural Networks and Learning Systems, 2023.
[2] Jiaming Zhou, Qing Zhu, Yaonan Wang, Xianen Zhou, Mingtao Feng, Xuebing Liu, Yang Mo*, Toward TR-PCB Bubble Detection via an Efficient Attention Segmentation Network and Dynamic Threshold[J]. IEEE Transactions on Instrumentation and Measurement, 2023, 72: 1-12.
[3] Lin Chen, Yaonan Wang, Zhiqiang Miao, Yang Mo, Zhen Zhou, Hesheng Wang. Transformer-based Imitative Reinforcement Learning for Multi-Robot Path Planning[J]. IEEE Transactions on Industrial Informatics, 2023.
[4] Yijiang Li, Yaonan Wang, Yang Mo*, Qing Zhu, Zhiqiang Miao, Yuefan Luo. Natural interactive control method for unmanned swarm systems based on gesture recognition[C]. 2022 IEEE International Conference on Robotics and Biomimetics (ROBIO), 2022: 207-212.
[5] Lin Chen, Yaonan Wang, Yang Mo*, Zhiqiang Miao, Hesheng Wang, Mingtao Feng, Sifei Wang. Multi-agent path finding using deep reinforcement learning coupled with hot supervision contrastive loss[J]. IEEE Transactions on Industrial Electronics, 2022.
[6] Jingmou Nie, Yaonan Wang, Yang Mo*, Zhiqiang Miao, Yiming Jiang, Hang Zhong, Jie Lin. An HQP-Based obstacle Avoidance Control Scheme for Redundant Mobile Manipulators Under Multiple Constraints[J]. IEEE Transactions on Industrial Electronics, 2022.
[7] Zijie Wu, Yaonan Wang, Yang Mo*, Qing Zhu, He Xie, Haotian Wu, Mingtao Feng, Ajmal Mian. Multiview Point Cloud Registration Based on Minimum Potential Energy for Free-Form Blade Measurement[J]. IEEE Transactions on Instrumentation and Measurement, 2022, 71: 1-14.
[8] 莫洋, 王耀南, 刘杰, 缪志强, 张鑫, 江未来. 我国智能机器人核心芯片技术发展战略研究[J]. 中国工程科学, 2022(004):024.
[9] Yang Mo, Yaonan Wang, Hong Yang, Badong Chen, Hui Li, Zhihong Jiang. Generalized Maximum Correntropy Kalman Filter for Target Tracking in TianGong-2 Space Laboratory[J]. Space: Science & Technology, 2022, 2022.
[10] Yang Mo, ZhiHong Jiang, Hui Li, Hong Yang, Qiang Huang. A kind of biomimetic control method to anthropomorphize a redundant manipulator for complex tasks[J]. Science China Technological Sciences, 2020, 63(1): 14-24.
[11] Yang Mo, Zhihong Jiang, Hui Li, Hong Yang, Qiang Huang. A biomimetic planning control method to anthropomorphize a 7-DOF redundant manipulator in unstructured environments[C]. 2019 IEEE 9th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER), 2019: 695-700.
[12] Yang Mo, ZhiHong Jiang, Hui Li, Hong Yang, Qiang Huang. A novel space target-tracking method based on generalized Gaussian distribution for on-orbit maintenance robot in Tiangong-2 space laboratory[J]. Science China Technological Sciences, 2019, 62: 1045-1054.
[13] Yang Mo, Zhenzi Song, Hui Li, Zhihong Jiang. A Hierarchical Safety Control Strategy for Exoskeleton Robot Based on Maximum Correntropy Kalman Filter and Bounding Box[J]. Robotica, 2019, 37(12): 2165-2175.
[14] Zeyuan Sun, Hong Yang, Yifan Ma, Xin Wang, Yang Mo, Hui Li, Zhihong Jiang. BIT-DMR: A humanoid dual-arm mobile robot for complex rescue operations[J]. IEEE Robotics and Automation Letters, 2021, 7(2): 802-809.
[15] Zhihong Jiang, Weigang Zhou, Hui Li, Yang Mo, Wencheng Ni, Qiang Huang. A new kind of accurate calibration method for robotic kinematic parameters based on the extended Kalman and particle filter algorithm[J]. IEEE Transactions on Industrial Electronics, 2017, 65(4): 3337-3345.
2. 发明专利
[1] 一种机器人宇航员稳定攀爬控制方法,授权
[2] 一种基于手、眼、臂协调操作的机器人抓取物体的控制方法,授权
[3] 一种基于卡尔曼滤波的机器人运动学参数标定方法,授权
[4] 一种基于深度学习的双臂机器人仿人作业规划方法,实审中
[5] 一种机器人用可快速更换末端工具的接口,实审中
[6] 一种沉浸式双臂机器人仿人远程操控方法,实审中
[7] 一种启发式规则的灵巧手作业规划方法,实审中
[8] 一种结合形似与神似的仿人双臂机器人运动规划控制方法,实审中
[9] 一种基于遗忘因子动态参数的机器人柔顺装配控制方法,实审中
[10] 一种基于两阶段的体势-手势整体姿态捕获方法,实审中
[11] 一种多模态分层融合的人机交互方法和系统,实审中
[12] 一种自主无人集群侦察系统,实审中
[13] 一种无人机挂载的高精度多点水体采样装置及采样方法,实审中
3. 软件著作权
[1] 天宫二号在规维修机器人视觉自主引导软件V1.0,已授权;
[2] 空间机器人复杂环境下动力学特性测试、验证与辨识软件V1.0,已授权;
[3] 机器人基于力与视觉感知的人机安全交互规划与控制软件V1.0,已授权;
[4] 空间机器人超高精度定向控制算法软件V1.0,已授权;
[5] 超高精度控制的机器人运动控制软件V1.0,已授权;
[6] 机器人视觉自主运动控制与仿真软件V1.0,已授权;
4. 部分研究成果

天宫二号空间实验室在轨作业机械臂全局视觉引导系统

第一代仿人双臂移动作业机器人系统

第二代仿人沉浸式双臂移动作业机器人系统

空间站仿生三臂移动作业机器人系统
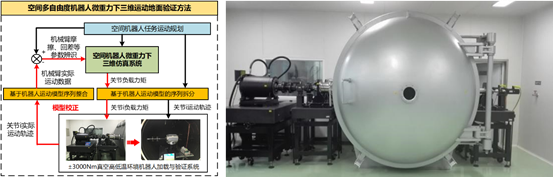
真空高低温空间机械臂动力学性能测试与验证系统

空间站大型机械臂全状态仿真与航天员操作训练系统

空地异构无人集群协同侦察系统

无人集群多模态人机交流移动指控平台系统
